<< content Chapter 12

Other topics (part 1):
Learning knowledge from teachers in the real world
When the robot is doing a math problem like addition,
his mind has an invisible guide that tells him how to solve the problem –
where to focus his eyes on, what knowledge to extract from memory, and how
to solve the problem step-by-step. It’s like an invisible teacher is there
pointing out things to the robot and tells him what to do next.
Solving any problem in life requires an intelligent
guide. It doesn’t matter if the robot is drawing a picture or writing an
essay or giving a speech. The invisible guide is there giving the robot the
knowledge to solve problems. This invisible guide is the robot’s
conscious.
Doing worksheets on paper requires this guide to tell
the robot important information. The first thing he needs to do is identify
the instructions. Next, he has to follow the instructions. If he has a
question, he will ask the teacher. Once, the robot reads the worksheet
instructions, the conscious is actually translating the instructions into
specific tasks. Tasks are put into the task container and rules are put
into the rules container. Knowledge of that specific worksheet will pour
into the robot’s conscious. The robot will do tasks in linear order until
the entire worksheet is completed.
When the robot is doing an addition problem, the
robot’s mind shows an invisible finger pointing at numbers on the paper.
This invisible finger is all in the robot’s mind and isn’t anything
physical. Sentences will activate that tell him how to modify the numbers,
how to add numbers, how to erase numbers, etc. The robot might be
instructed to use scratch paper to do secondary equations and use the answer
for his original equation.
In a worksheet, the instructions might be to cut out
images. The robot’s conscious has an outliner that delineate where the
boundaries of the image are. This outliner can be a finger that is pointing
at the outer thick lines of an image or it can be a computer generated line
that appears at the outside lines of an image (it depends on how the robot
learned to delineate images). The robot might be watching TV and the
teacher is using computer generated lines to show the students where the
boundaries are. On the other hand, a teacher can point a finger, linearly,
where the boundaries are.
The collective knowledge of doing worksheets is a vital
ability to accomplish complex tasks. Doing any worksheet require an
intelligent guide that help the robot to focus on specific objects, point to
things he should be aware of, give facts about objects, manipulate data, and
identify things in the worksheet.
Reading videogame magazines and applying the knowledge
to games
Knowledge read in any book or magazine is stored in
memory in an associational way. If I am reading a magazine about
videogames, I ‘m storing all that knowledge in my videogame area in my
brain. Specific games in the magazine will be stored in specific areas in
the videogame area. Let’s say that I was reading a magazine, and in it, is
a section on Zelda. I will read the knowledge and these knowledge will be
stored in the Zelda part of my brain. There might be facts about the
controller and my brain stores that fact in the controller area. There
might be facts about level5 and my brain will store that fact in level5.
Finally, there might be hints given about the game that will give a general
strategy for the reader (me). My brain will store all the hints in the
Zelda area. If you look at the interconnected structure of the network, you
will see that data read on Zelda is stored in a general area (FIG. 63).
FIG. 63
Because the data is stored in memory, as well as,
stored in the long-term memory, the data is very strong. The next time I
play Zelda, the facts from the magazine will be strong data and it will most
likely be activated in my mind. Association is a powerful tool used to
recall data. If I was looking at my controls, the data read in the magazine
about the controls will activate. If I was in level5, the data on level5 in
the magazine will be activated in my mind. If I get stuck in the game, the
general hints from the magazine will activate in my mind.
These facts learned from the magazine were activated
because they had association with objects in Zelda. If I was playing a
different game like contra, none of the facts from the magazine about Zelda
will activate. The reason why is because my brain stored the data from the
magazine in the Zelda area. The word Zelda stores all the facts. The
content in the facts store them in specific areas.
One of the most powerful facts is the if-then
statement. If the robot recognizes a condition, then it might take action.
The if-then statement is powerful because the robot is always identifying
things.
If the robot recognizes a dog, then activate its
stereotypes.
The above sentence defines the rules program. When the
robot recognizes the target object it will activate its strongest element
objects. The robot can be reading a videogame magazine, and during his
read, he might translate knowledge read into an if-then statement. “If you
recognize the wizard in level5, give him 5 rupees and he will tell you where
to find the lamp”. The next time the robot recognizes important objects in
the environment such as wizard or level5 or lamp, the if-then statement will
activate. This will give the robot a new task, which is to go to level5 and
find the wizard and do the instructions in the if-then statement.
Association will also bring far away data in memory
closer together. Migration of data from one part of memory can be done
using association. The process is accomplished by activating conscious
thoughts, storing these thoughts in the current pathway, and letting the
self-organization do its part.
The robot talking to itself
When the robot learns how to have a conversation with
people, the intelligent pathways can also form self-awared behavior. The
robot can talk to someone and that someone is itself. Using intelligent
pathways to have a conversation with someone is also used to talk to
itself. In fact, all intelligent pathways can be used to talk to itself.
When the robot is bored, he might “daydream” by planning what he will do 1
week from today or plan what kind of food he wants to eat for lunch.
He might even talk to itself any moment that he isn’t
engaged in the real world. During analyzing and observation, the robot is
talking to itself about what he is seeing. During a conversation, the robot
might be telling itself how the conversation is going or tell itself the
good experiences his having in the party.
I call this imaginary friend, the robot’s conscious.
This friend is the robot, and he knows that secrets can’t be hidden, or any
private knowledge is revealed. The robot will be totally honest with this
imaginary friend. However, there are some exceptions. The imaginary friend
might be in denial or the friend believes a false fact.
Teachers are partly blamed for creating this imaginary
friend. The teachers give lessons to the robot such as: “when you are
bored, think of something”, “critique about a person”, “close your eyes and
come up with imaginative thoughts”. The voice in your head can also be
learned through trial and error.
Watching TV might create this imaginary friend. When
the robot watches TV, a character might be talking to itself. The robot
will copy this behavior. If the robot was watching a comedy show and the
character is critiquing about how a person dresses, this knowledge can be
copied by the robot. He will go to a party and talk to itself about how a
person dresses.
The fabricated movie defines the relationships between
objects
Teachers will teach the robot the relationships between
objects. The teacher will draw diagrams, in terms of primitive lines, to
show relationships. For example, if the teacher wanted to show a car
driving from destination to destination, he/she can use arrows to represent
the driving. If the teacher wanted to show a parent child relationship,
he/she can use a hierarchical tree, with nodes representing a parent or
child and lines representing a relationship. The teacher can use flow
animation to show the actions of an object. For example, the first frame
can be a person1 kicking person2 and the second frame can be person2 on the
ground and person1 standing. These two sequential frames indicate an
action. The action is person1 kicking person2 to the ground.
These diagrams are very important because they
represent the meaning to sentences. When this sentence is read: “Sam
kicked Danny on the stomach”, the robot will activate the meaning to each
word. The meaning might be the two sequential frames mentioned above. The
two sequential frames might be universal and can be modified. For example,
the learned lesson might be person1 kicking person2 on the arm. The
universal 2 frames can be modified so that an image of Sam replaces person1
and an image of danny replaces person2. Instead of sam kicking danny on the
arm, the 2 frames will be replaced with sam kicking danny in the stomach.
The robot fabricated a 2 frame sequence using other intelligent pathways in
memory.
If this sentence is read: “Danny is driving to the
store”, the diagram of a map with danny and an arrow drawn to the store,
will be activated in the robot’s mind. If this sentence is read: “the kid
has stubborn parents”, the robot might activate a hierarchical tree diagram
with facts related to the sentence. Facts like the word stubborn on the
parent node and the kid node is represented by a picture of an average kid.
The meaning to sentences is based on what the robot
learned from teachers. No language parsers are used or no semantic networks
are used to represent language. The associated things the robot learns from
the environment creates the meaning to language.
Referencing words to other words
FIG. 64 is a diagram depicting the meaning to the word
dangerous. The word dangerous is represented by images of destruction. The
images are various pictures or movie sequences depicting nuclear bombs,
guns, highways, swords and viruses.
The word is a sound “dangerous” and is the target
object. The meanings, represented by pictures or movie sequences, are the
element objects.
If a sentence is read to the robot such as: “the word
hazardous is another word for dangerous”, the robot will store this sentence
in memory in a meaningful way. The sentence is commanding the robot to
store data in an intelligent way.
FIG. 64
The pattern in the sentence is trying to instruct the
robot to store the word: hazardous near the word: dangerous. The
closeness of the word hazardous to the meaning is the end result (FIG. 65).
FIG. 65
Even more remarkable is if another word points to
hazardous. For example, this sentence: “the word harmful means
hazardous”. Now, we have three words pointing to the same meaning. Of
course, each word will have a specific type of meaning. However, all three
words share common traits. The self-organization of data in memory will
determine this.
Learning to activate correct stereotypes based on
target objects
When a target object is recognized in memory all
element objects will compete with one another to activate in the robot’s
mind. The robot can learn from teachers what to activate based on
recognized target objects.
I described how this method works in previous chapters.
I just wanted to note that the search patterns are based on the learned
lessons in school and the configuration of data in the robot’s brain. For
example, the teacher said: the stereotype for H1 is H2, H3 and H4. With
this sentence, the robot will find patterns between this sentence and the
data configurations in memory. It will find out that H1 is the target
object and H2-H4 are the element objects and that the sentence is a command
to configure the data of the target object and the element objects.
This way, the data in memory are configured based on
lessons in school. We can train the brain to activate correct stereotypes
based on recognized target objects in the future. The stereotypes of a
person are different from the stereotypes of an event. The facts from an
event are different from the facts of a science book. The searching for
data will create optimal search results for different target objects. This
behavior is learned through sentences read in books or by lessons from
teachers.
It depends on what the current situation is and the
goals of the robot. If the robot was reading a book, he wouldn’t want
grammar rules to activate. When the robot is reading a book, he just wants
to activate a fabricated movie on the story. On the other hand, if the
robot was correcting papers, then grammar rules and lessons should
activate. It depends on many factors, how the rules program will activate
element objects based on recognized target objects. These factors include:
the goals of the robot, the current situation, the mood of the robot and
what happened in the past.
Using discrete math to represent objects, events and
actions
Meaning of something can be done by using diagrams or
animation. A picture can represent complex things like the universe or an
entire city or an ambiguous word such as war.
FIG. 66 is an illustration depicting how definitions of
words can be represented by diagrams. In the illustration, there is one
picture of a duck and the definition is a herd of ducks. Apparently, in
order to be considered a herd, the ducks have to number 8.
FIG. 66
This just goes to show that word/s can be defined by pictures or movie
sequences -- an animation of a diagram, whereby pictures and lines are put
together to mean something. In other cases, a single picture can represent
that word. For example, the word universe can be represented by a picture
of stars in the night sky. Or the universe can be represented by an
animation of the solar system (FIG. 67).
FIG. 67
If you look at a dictionary, words are listed next to
their definitions. When the robot reads the definition of a word, a
fabricated movie is activated. This fabricated movie is made up of a
combination of 5 sense data (mostly visual images) that represent the
meaning of the definition (sentence/s). This meaning is a diagram
animation. Thus, innately, each word is represented by a fabricated movie.
This fabricated movie can also contain static data like a form or
picture.
The event pool
FIG. 68 is a diagram depicting how the event pool
works. While the robot’s brain predicts the future pathways, an event pool
is used to rank what events will most likely happen in the future.
The event pool comprises intelligent pathways ranked in
a hierarchical manner. All these intelligent pathways will point to future
events in predicted future pathways. Intelligent pathways can be rules,
tasks, complex discrete math functions, logical thoughts, searching for
data, storing data, modifying data, facts about an object or group of
objects, meaning to language and so forth.
The event pool stores the instructions of what will
happen in the future and what actions the robot will do in the future. At
each iteration of the for-loop, the robot will select an optimal pathway
from memory. This pathway basically defines the robot’s conscious. It
defines the tasks to be done, the rules to follow, the logic to manipulate,
the information to extract from memory and so forth.
The optimal pathway selected at each iteration will shape the computer
program inside the robot’s conscious and it will instruct the robot to: do
tasks, solve interruption of tasks, follow rules, provide knowledge about an
object or situation, provide meaning to language, fabricate a movie, solve
problems, logically think, do complex decision making and so forth.
FIG. 68
Playing street fighter
Imagine that the robot has never played street fighter
before and he has no prior knowledge of what the videogames’ objectives and
rules are. The robot will play and observe the game and identify what is
good and bad in the game. Logical pathways that analyze a situation can be
used to come up with the objectives of the game. The rules of the game will
also be identified when the robot (the player) does something good or bad.
These good and bad behaviors in playing the game keep
or delete tasks and rules. The good facts are kept and the bad facts are
deleted. When the robot is confronted with the same situation, vital facts
(such as rules or tasks) will activate and the robot will follow these
facts.
Trial and error is one way of learning the objectives
and rules of a game. Another way is from reading magazines and from
listening to other people. The robot might be reading a magazine about
street fighter. In the article, the author list four hints to the game.
The robot will store these vital hints in memory and remember to use them
when playing the game. When the robot is playing street fighter, these
hints will activate, depending on what their contents are. The robot will
try these hints. If hints are tried and they don’t work, the robot will
delete these hints from memory. If hints are tried and they work, the robot
will remember these hints in memory. Thus, the objectives and rules of the
game are learned, but only through trial and error are these facts
modified. The robot will keep information that are important and forget any
information that is not important or wrong.
Let’s say that in the magazine, the robot read an
article about street fighter and there were 4 hints that the robot
identified as being important. The 4 hints were extracted by reading the
magazine, summarizing paragraphs, identifying important facts and so forth.
The robot stores these hints in their respective storage areas in memory.
When the robot plays street fighter, these hints will activate based on
situations, whereby the situation has associational links with the hints.
Let’s say that the robot tried hint1 and hint3 and they work in the game.
The robot will remember these hints in future similar situations. On the
other hand, the robot tried hint2 and hint4 and they don’t work in the
game. The robot will not remember these hints in future similar
situations. These bad hints will not be deleted from memory, they will only
have low powerpoints. Data in memory can only be forgotten and not
deleted. Besides, if the hint was correct, but the robot misinterpreted the
hint, then the hint can be recalled in the future and the robot can reason
that the hint was misinterpreted. This opens up the opportunity for
mistaken or bad data to be recalled again.
These examples just show that the objectives and rules
can be learned by reading books and being taught by teachers. However, the
knowledge learned should be modified by the process of trial and error.
This limits the amount of knowledge learned and greatly prioritizes
knowledge.
In the game of street fighter, the robot must learn a
lot of rules (mostly comprising if-then statements). If the opponent does
this, then take this action. If the opponent does this, then take that
action. Very complex combinations of moves must be used to defeat enemies.
The robot might throw a fireball, jump kick, and do a sweep. Or the robot
might do a high kick, low kick, helicopter kick and a fireball. The fun of
playing street fighter is to chain linear moves together to maximize the
damage of your opponent. This objective of the game may not be apparent to
players, but everyone who plays street fighter have to accomplish this
objective in order to beat the opponents.
FIG. 69 is a diagram depicting various intelligent pathways to play the
game. A condition must be met in order to execute the linear tasks. In the
first pathway, the condition is that the opponent is wide open. Being wide
open means the opponent is open to an attack. When Ryu does a flying
uppercut; and when he lands on the ground he is wide open. If guile does a
razer kick and lands on the ground, he is wide open. When an opponent has
spinning stars on his head he is wide open. The intelligent pathway can be
used when any opponent is wide open. In the second intelligent pathway, the
condition is that the opponent is close to a wall. When an opponent is near
a wall the player can do aerial moves on the opponent and chain moves
together.
FIG. 69
The intelligent pathways can have similar type of
conditions or actions. For example, in intelligent pathwayB, the condition
part can be any solid object behind the opponent. The condition part can be
a sequence of criterias or it can be a range.
These intelligent pathways (rules) to beat the game
came from another intelligent pathway to identify “workable” actions. The
robot will set up goals like: chain moves together and see which
combination of moves can give the maximum amount of damage. The result of
trial and error will store these move combinations in memory.
Playing an unknown game require pre-existing
intelligent pathways that guide the player to benefit in the game. The
strategies that work will be kept and the strategies that don’t work will be
forgotten.
When all these rules and objectives are stored in
memory, the robot can select which ones to use at certain times. The
optimal pathways selected each millisecond will generate a computer program
inside the robot’s conscious to tell him the rules of a situation and what
linear moves to use in the game.
The computer program inside the robot’s conscious might
have functions that can give facts about what the robot should do and the
robot can select from a number of possible actions. For example, if the
opponent is guile, the conscious will tell the robot to stop jumping over
guile. The reason for this is because when a player jumps over guile, he
will unleash his razor kick. While the task of not jumping over guile is
followed, there are other functions that tell the robot to use various
strategies to beat him. These strategies are learned through trial and
error.
If the robot was playing against Dalsim, the conscious
will give facts that the robot must follow, such as stay close to Dalsim and
do not attack from far away. While these rules are being followed, the
conscious will give specific strategies to the robot to beat Dalsim. A
strategy would be to charge him and use any move in combinations.
If the robot was playing against blanka, the conscious
will give facts that the robot must follow, such as don’t use the fireball.
Blanka has a very fast jump time and when the robot does a fireball, it
opens up the robot to attack. Other strategies will activate such as using
specific sequence of tasks to beat Blanka.
For different opponents, different strategies are used
and different rules are followed. In fact, for specific types of
situations, a unique type of action is taken. All these strategies and
rules are learned through trial and error or by learning information in
videogame magazines.
Another factor is the mood and objectives of the player
(the robot). The identity container in the robot’s conscious will provide
important facts of the robot in terms of decision making and rule
boundaries. In this case, the personal rules and personal decision making
of the robot will pour into the conscious. The robot might play the game
for fun or to beat the entire game. Depending on the factors of playing a
game, the robot will do things differently. If there is a scene where a
combination of moves might not work, but the robot is playing for fun, he
might actually use this combination. He has nothing to lose because he is
playing for fun. On the other hand, if the robot was playing in a
tournament and he was confronted with that decision, he will not select that
combination. The reason why is because he knows there is a high probability
that the combination will not work.
The robot might be playing against a kid and his goals
are to play the game like a beginner. He wants to make the kid (opponent)
feel good, so he is playing poorly.
One more note is that the robot can select any
character to play in the game. He can play as blanka, ryu, ken, chunli,
dalsim and so forth. Also, the videogame can select any character as the
opponent. The robot has to be aware of who the player is and who the
opponent is.
The identification of pain/pleasure events provides the
basic strategies of the game. Through trial and error, being hit by an
opponent will cause the robot’s life energy to be lowered. This event
causes pain. The robot (the player) also learned from playing other
videogames that when the player’s life energy is lowered it is a bad thing.
When the robot blocks an attack from an opponent, he doesn’t lose life
energy. When the robot attacks the opponent, the opponent’s life energy is
lowered.
The identification of pain/pleasure events generates
basic strategies for the game. The robot will know that: “he has to attack
the opponent until his life energy is gone”, “he has to block attacks from
the opponent”, “he has to face the opponent and be in close reach in order
to attach”. These rules are the basic foundations of playing street fighter
and the robot learned these rules through trial and error.
Next, logic is needed to generate goals to benefit the
robot in the game. One logical goal might be to: “hit the opponent with
chain moves to maximize the lost of life energy”. This goal is generated by
logic. The robot is able to analyze the game and come up with beneficial
facts to play the game. After the logic is generated, the task of the robot
is to try the goal and see if it really does work. The trial and error
generate more strategies for the game. These strategies are more complex
and it benefits the robot more than basic strategies. Id of goals can also
be read in magazines or spoken by a stranger.
Most strategies generated by the robot’s conscious are
from trial and error. When this condition happens, then take this action.
When that condition happens, then take that action. These if-then
statements (or combo of basic discrete math functions) will be stored in
specific intelligent pathways.
Teaching the robot how to imagine in 3-d space
When the robot lives in a home for many years, his
brain stores the 3-d sequences of walking through the home. In memory, he
has a static 3-d representation of the house he is living in. This is
important because the 3-d sequence of the home from memory will be accessed
at some point to do reasoning. For example, if the robot was in the living
room and someone from the bathroom flushes the toilet, the robot will know
that someone is in the bathroom. The robot currently sees the living room,
but doesn’t see the bathroom.
If the robot was in the living room talking to friends
and someone asked: “where is the bathroom”, the robot will activate a
simple 3-d surrounding of its current area and use this information to
answer the question.
In order to answer the question the robot has to be
taught how to answer the question. In elementary school, teachers set up a
make believe environment. The robot is taught how to identify where he is
currently at. The teacher will put the robot in a room and she will ask the
robot where he is currently located. The robot will look around and answer
the question.
Next, the teacher will ask the robot: “where is the
bathroom?” The make believe environment is set up so that the rooms are
identified easily. The robot will analyze the different rooms and point to
a room with a toilet and a sink and say: “there”.
In real world examples, a home is large and rooms can’t
be seen all at once. If someone asked the robot where the bathroom is, he
has to activate a 3-d sequence of the home and locate the living room (the
robot and the guest is currently located), and follow the 3-d sequence of
getting from the living room to the bathroom. By analyzing certain areas of
the living room, the robot knows which path leads to the bathroom.
FIG. 70 is a diagram showing the 3-d sequence to go from the living room
to the bathroom. After activating the 3-d sequence, the robot’s brain
analyzed data in the frames and determines that frame2 is the area he should
point to. In sectionC, the robot has to translate the direction someone has
to travel to get to the bathroom. The two tasks, pointing to the direction
and translating a path to the bathroom, are done by analytical pathways in
memory. These intelligent pathways are learned previously.
FIG. 70
The teachers can use sentences to control how the robot
imagines things. Sentences like: “imagine your house and see where you are
currently at and determine travel paths to get to the bathroom?” or “imagine
your house and give directional path from the current location to the
bathroom?”. These sentences are guides that will hopefully form intelligent
pathways to teach the robot how to answer 3-d locations. Although the robot
can’t see the entire house all at once, he can extract the 3-d sequences of
the home in memory and use that information for reasoning problems.
A more difficult task is to visualize entire cities and
states. Maps are used or spaced-out still pictures of far away places are
used. Sometimes driving in a car will help speed up the travel from one
location to the next. The robot can use car driving 3-d sequences to map
out entire cities. If the robot walks around the city, the map would be
large. However, if the robot drives around the city, the map will be
small.
Other learned 2-d still maps of the city can activate
and the robot can use those data to answer location questions. 2-d maps of
the state are used for planning routes. This map can also be used for
showing distance between two areas. The map statistics should be the
measurement for distance. For example, in the map, the legend says that 1
inch is equivalent to 1 mile. If the robot is asked a distance question
such as: “how far is it from town1 to town5”? The robot will activate the
2-d map and analyze the approximate distance. He determines that the
distance between town1 and town5 is equivalent to 3 inches. 3 times 1 mile
equals 3 miles. The robot will remember the data “3 miles” and tell the
person: “it takes 3 miles to drive from town1 to town5”.
Other times, the robot will take still pictures of a
location from memory and use analytical skills to interpret distance. The
still picture is the current location of town1 and in the far distance, the
still picture has a view of town5. The robot can use logic about distances
in pictures and determine how far it is from the current location (town1) to
the destination location (town5).
Distinguish knowledge in science diagrams
When a science diagram is stored in memory, there are
many different types of data. The robot’s brain will distinguish different
data types by tagging most likely sequences together. A visual human body
is one type of data and the connections weights will be unique. Facts about
a particular body part, like the heart, is another type of data and their
connection weights will be unique. There should be a clear distinction
between searching information on visual human body and facts about the
heart.
Using logic to assign objects/events/actions to words
Very complex words are represented by logical
identifications. The sentence below needs the robot to identify all if
conditions. If all conditions are true, then the word will be assigned to
an object, event or action.
Sentence: If he looks left and his explanation is
unbelievable and he is doing hand gestures, then he is lying.
In the sentence above, there are three conditions that
must be identified in order for the person to be lying. The conditions
are: he looks left, his explanation is unbelievable and he is doing hand
gestures. If all three conditions are identified by the robot, then the
action “he is lying” is true.
In this case, lying is an action of a person. In order
to determine if it exist for the person, three conditions must exist. If
the three conditions exist then that means the person is lying.
In a dictionary, a word comes with a definition. The
example below shows the definition of the word aggressive.
Aggressive: a person is aggressive if he/she is angry
and uses physical force.
This sentence has a pattern to identify aggressive
behavior in a person. The next time the robot sees Jake angry and he uses
physical force, the word aggressive activates and is assigned as a behavior
belonging to Jake. There are two conditions in this word: “the person is
angry” and “he/she uses physical force”. Once the robot recognizes the two
conditions, he will activate the word aggressive.
Similar words can also be distinguished by using
logic. The word hop and jump are very similar. Someone can jump and the
teacher will say that he/she hopped. Teachers can teach the robot what the
distinctions are to better understand what a person is doing. Let’s say
that the teacher said that a hop is when someone jumps straight up in the
air and a jump is when someone jumps in any direction. The teacher will
demonstrate using her body.
What is this action? -- (teacher jumps straight up)
“this is a hop”.
What is this action? -- (teacher jumps forward) “this
is a jump”.
In both examples, the teacher is giving the question
and the answer (supervised learning). The robot will create patterns
between similar examples and understand what the distinction is between
similar words like hop and jump.
In more complex cases of identifying objects/events and
actions, probability and calculations must be made during runtime to
determine what is happening. A sentence like: “if the clouds in the sky
are equally distributed, then it will rain”, will require the robot to look
at the sky and see if the clouds are equally spaced out in the sky. If they
are then the robot’s brain will activate: “then it will rain”.
Learning probabilities can also be factors to identify
objects, events and actions. Maybe, the conscious builds a specific type of
computer program that will balance probability of things happening.
An example would be this sentence: “if the house is
messy and the drawers are pulled out and the front door is ajar, then the
house has been robbed”. The robot has to look around and see that the house
is messy and the drawers are pulled out and the front door is ajar. When
all these conditions are met then the thought: “I’ve been robbed” activates
in his mind.
Patterns to search functions in intelligent pathways
In search engines, the input data are text words typed
into the search box. These text words are the input variables for the
search function. The human robot doesn’t define the variables to search for
information in memory. Instead, the intelligent pathways in memory
self-define variables to search for information in memory. One really good
example is questions and answers. The robot learns the steps to answer a
question from teachers. When the robot learns many similar examples, these
examples self-organize in memory. During the self-organization process,
patterns are formed that define what the search variables are.
Thus, unlike search engines, the human robot uses
patterns in intelligent pathways to define what types of variables to search
for in memory. Also, the type of output from the search function is defined
by patterns. The current search engines use computer scientists to write
the codes for the search functions (only some have adaptive properties). A
human robot learns how to search for information in memory, in terms of what
to search for and what to output.
The robot takes in 5 sense data from memory, called the
current pathway. Also, the robot has conscious thoughts like its goals,
intensions, rules of searching and so forth. Based on the robot’s 5 senses,
as well as his conscious thoughts, the search variables are defined. You
can say that the search variables would be: the robot’s tasks in the task
container, the rules in the rules container, the facts in the identity
container, the intelligent pathway instructions outlining search patterns,
the id of target objects and their activated element objects and so forth.
All these variables are used to search for data in the robot’s brain.
Current search engines, try to use software to guess
the intentions of the user such as goals and rules, but they don’t have an
exact assumption. If you think about it, its not really the search engines
that is doing to real intelligent task of searching for websites, its
actually the user that is performing the intelligence.
Learning, configuring and storing data
The robot learns information through its 5 senses:
sight, sound, taste, touch and smell. However, there are different types of
learning media. A robot can learn from a teacher through classroom
lectures, or reading a text book, or watching Sesame Street on TV.
Different medias will store information differently. In this section, I
will outline how data is learned, configured and stored in memory.
Most of the data stored in memory are stored in a
3-dimensional visual format. The majority of data in the brain is made up
of visual images and movie sequences. When they self-organize, all 5 sense
data will be centered around visual images. If the robot reads a textbook,
the information from the textbook will be stored as a physical visual book
in memory. Since the robot reads the book linearly – read page1 before
reading page2 – he will store the first page in memory exactly to the way he
encounters the first page. Page1 will be stored to the right and page2 will
be stored to the left. Next, when the robot flips the page, page3 and page4
will be present. Although, page3 and page4 exists in the same area as page1
and page2, the robot understands that the pages are configured compactly.
If the robot reads a textbook, the entire physical text
book will be stored in memory. All contents read will be stored in memory
in a linear and organized way. Questions asked about the book can be
answered such as: what was chapter1 about, what’s the difference between
chapter1 and chapter6, how long did it take you to finish reading chapter3,
what chapter talked about evolution? These questions are answered by
activating the text book from memory and flipping through the pages to look
for information. The robot has to search for information in an approximate
manner and might make mistakes. For example, he might mistakenly store
chapter9 after chapter10.
Other topics (part 2)
The conscious can fabricate character voices
I’m a huge fan of the x-men comic books. I like to
read back issues of the x-men on my free times. When the cartoon series
came out, I started to watch those too. In the comic books, I have an idea
of what the characters look like from still pictures. In the cartoon
episodes, I have an idea of what the voices of the characters sounds like.
One day I was reading an x-men comic book and something
very strange happened. I noticed that while I was reading the spoken
captions, the voices of the characters are presented. For example, if I
read the caption for wolverine, the voice of the text in my head sounds like
the voice of wolverine from the cartoon. When I’m reading the caption for
professor X his voice from the cartoon is presented in my head.
Somehow my brain created a computer program that can
translate text captions from a character (in a comic book) and output the
voice of the character (in the cartoon) in my mind. This is remarkable
because this is impossible to do in current software.
The reader can try this at home. Watch a movie like
Harry Potter and then read a Harry Potter book and you will actually hear
their respective character voices while they speak.
The conscious can override certain dominant rules
temporarily
The computer programs inside the robot’s conscious can
disable certain dominant rules temporarily. For example, if the robot was
playing a racing videogame and there is a rule that said: “If the sky is
green, the traffic light rules are reversed”. This means that if the sky is
green in the videogame, the rules of the traffic lights are in reverse – the
red light means green light and vise versa. The dominant facts in memory
are: the red light is to stop and the green light is to move forward.
In this game, the dominant facts are extracted and the
conscious manipulate the facts so that they are changed according to the
videogames’ rules. The example below demonstrates this point.
Dominant
rules: Modified rules:
Green light = move
forward Green light = stop
Red light =
stop Red light = move
forward
The computer program inside the conscious was able to
take dominant data and to manipulate them using other rules. This type of
temporary rule modification is used only in this videogame. If the robot
plays any other racing videogame or drive a real car, the dominant rules
will be used. This example shows that the conscious can disable a dominant
data in memory temporarily and modify and use them under rare conditions.
To make this example more complex, imagine that the
robot has current science knowledge about the world and how it works. An
instruction was given to the robot to pretend like the year is 1700; and the
robot is a character in this year. He was also instructed that all current
science knowledge after 1700 are not known yet and that the robot has to
answer questions according to the year 1700. The first question asked is:
“is the world flat?”. In 1700, the majority of people living in that time
period have no idea what this question means and how to answer it. The
robot has a dominant data in memory which is the world is round. However,
the robot has to pretend like he is in 1700, so the conscious tells him to
say yes to the question.
The second question is: “Do you like to drive your
automobile?”. According to the robot, he loves to drive his automobile,
however, the automobile wasn’t invented until the early 1800’s. The robot
will probably give this answer: “what is an automobile?”.
The robot is given a task to be a professor in 1700 and
to explain how the human brain works. The robot has current knowledge about
the brain and how it works, however, in 1700, people have wrong information
about the brain. The computer program inside the robot’s conscious has to
take what it knows about 1700 medical knowledge and explain this knowledge
to an audience. Back in 1700, they didn’t know the various components that
make up the brain. They simply know that the brain was responsible for
thinking and acting. They didn’t know about neurons and chemical signals.
Some information might be wrong such as the brain was one unit. Later on,
people found out that the brain had interconnected hemispheres: left brain
and right brain.
The idea I’m trying to convey is that the robot has all
this knowledge in memory. The intelligent pathways are able to process data
and output meaningful facts based on a situation.
The conscious can correct data in memory quickly
If the robot was taught that the world is flat for many
years and one day someone published an essay that explains the truth -- that
the earth is round, how will the robot correct the wrong data in memory? It
really doesn’t matter how strong data is in memory or how much times the
robot learned this data. The robot’s conscious can correct any data in
memory instantly.
The world is flat is a very dominant fact for the
robot. However, intelligent pathways are able to put a tag on this dominant
fact and point it to another fact. A teacher might teach the robot: “no,
you are wrong. The earth isn’t flat, it is actually round”. These two
sentences basically put a tag on the dominant fact: the earth is flat and
put a pointer that points to a new fact: the earth is round. The next time
the robot searches for the fact: the earth is flat, it will see that there
is a pointer, stating this fact is wrong and the correct fact is: the earth
is round. As time passes the wrong fact is forgotten and the correct fact
replaces it.
Predicting the future by using activated thoughts
My AI program (the human robot) has two methods of
predicting the future. One is by matching the current pathway to the best
pathway in memory and analyzing which future pathways benefit the robot the
most. The second method of predicting the future is by using intelligent
pathways in memory to extract specific future data.
Different types of future predictions are used for
different situations. The robot must learn how to predict the future. In
order to do this, teachers have to teach the robot these lessons. If the
robot was asked a question: “who will most likely succeed in life?”, and
two pictures are presented. One picture represents a high school drop out
and the other picture represents a college graduate. The robot will analyze
each person and predict what will happen to them in the future. Next, the
robot will compare the two futures and decide which person will most likely
be successful.
The intelligent pathway to answer this question will
require coming up with linear predictions of where each person will be in
the future. For example, the college graduate will look for a job and
he/she will most likely get hired by some company. On the other hand, the
high school drop out will also try to get a job and will most likely be
turned down.
Other facts must be considered. What if the college
grad had a major in art? This would not give that person a leaping
advantage over the high school drop out. The high school drop out might be
blessed with good looks and get hired as a movie star. These external
factors also have to be considered before answering the question.
The point I’m trying to make is that the intelligent
pathways to answer the question will do things intelligently so that the
answer to the question can be done in a logical and efficient manner.
The teachers in school will teach the robot how to
predict the future through worksheets and examples. After many similar
situations, the robot will have universal pathways stored in memory to
predict the future efficiently. Below are lessons that teach the robot what
to do in the future under a specific situation. In some respects, these
lessons are like if-then statements. If the robot recognizes R1, then do
R2.
1. When you see a dangerous animal, run and get help.
2. On weekdays go to school.
3. Eat lunch at 12 o’clock everyday.
4. When you can’t solve a problem apply the scientific
method.
These lessons are very basic. The brain of the robot
will identify these lessons and store them in an organized manner. In the
future, if the robot was in the swamps and sees an alligator, the search
function might take variables: alligator and danger; and the conscious
might activate “run and get help”. The target objects (or variables) danger
and alligator has strong association with the rule: “when you see a
dangerous animal, run and get help”. The search function will take specific
target objects and the conscious will activate their strongest element
objects. In this case, the robot recognizes alligator and danger. The
robot’s conscious took these two target objects and activated the strongest
element objects between them, which is “when you see a dangerous animal, run
and get help”. The actions: “run and get help”, is the future actions the
robot will take.
Predicting the past/future using linear tasks
If you watch CSI, you will notice that the
investigator’s job is to predict what happened in the past. The
investigators have to use technology to find out what happened in the past
regarding a case. Their findings will be plotted on a timeline. In order
to do this, the investigators have to know what the steps are to predict the
past. These investigators, no doubt, had to go through criminal school in
order to get their job. In criminal school they teach you the procedures
and steps to generate a timeline of a crime.
The information in the timeline can be general or
specific (or both). The way that the teachers teach the investigators
determines how the timeline will be plotted. If a crime happened and the
crime lasted for 2 years, the timeline might have general spaced-out events
of what the criminal did in the last 2 years. Or the information in the
timeline might be general information; with a few specific information
added.
The conscious help solve problems when stuck in a
videogame
A role playing game like Zelda requires deep logic in
order to solve problems in the game. If the robot is “stuck” in the game
and he doesn’t know what its objectives are and where to go next, he needs
to use deep logic in order to solve this problem. It is frustrating when
you play Zelda and you are stuck in the game. You try something and that
something doesn’t work. You try something else and that something else
doesn’t work. At this point, the robot will use lessons taught in school to
identify a problem, plan steps to solve the problem, try a strategy and
repeat itself over and over again until that problem is solved.
Usually, when the robot is stuck in the game, the
objective is to find out what the next mission is or what areas to go to.
The robot was taught that if it gets stuck, it has to travel all over the
land – in caves, in villages, and in forests to gather information. Talking
to characters in the game is a very valuable asset in terms of information
gathering.
For me personally, when I get stuck in the game, I
would roam the land going from place to place and talk to as much characters
as possible. Some places in the game are hidden to the player and requires
bombs to reveal their entrances. I would keep a note about where I went and
what information was gathered in respective places. Once I checked all
places, I would assume where hidden entrances might be located and use bombs
to see if there exist any hidden entrances. Sometimes characters would
say: “there is a hidden entrance to level4 by lake hylide”. This
information will tell me a possible area where the hidden entrance is. When
I get to lake hylide, I would look for obvious places where a hidden
entrance might be located. Finally, I would put bombs on places I think the
hidden entrance might be. If the bomb explodes and a hidden door is
revealed, then I have solved my original problem. This entrance leads me to
the next level (level4) which is the solution to the problem of where to go
next.
If the hidden entrance doesn’t appear and I have no
idea where the hidden entrance is, I will have to start all over again.
This failed trial can be used as information that I had gone to lake hylide
and checked the area for hidden doors, but was unsuccessful. My conscious
will tell me, in the future, I have done this task and I won’t repeat it
again. This narrows my future possible strategies.
At this point, I have to search and remember the quotes
from previously encountered characters and use logic to determine where the
hidden entrance might be. Maybe a villager I encountered told me that his
father was wondering in demon cave and he never came home, might be a clue
to the hidden entrance. Maybe his father went to demon cave and
accidentally found the hidden entrance and was captured by the guards. This
clue will prompt me to investigate demon cave. This quote might also be a
hint, whereby the villager wants me to go to demon cave to rescue and bring
back his father (a new mission).
An easier way to solve problems is to read strategy
guides for Zelda. They have specific information regarding where the hidden
entrance is to level4. Once the robot reads in the secret, he will know
where to go and what to do next.
Sometimes, solving problems can be by accident. In the
past when I was playing Zelda, I remember I was trying to find a hidden
entrance to level5 in the forest. I was in hylide forest trying to attack
enemies with fire when I accidentally burned a tree, revealing the hidden
entrance.
In another RPG game called super metriod, the player
has to go from room to room to beat bosses and complete missions. In some
cases, the character in the game can be trapped in a local area and in order
to get out, the character has to find hidden rooms. Many hidden rooms are
found by blasting the environment. When I get stuck in the game and I have
no idea where to go next, I simple go from room to room and blast the
environment (making sure that I don’t repeat going into same rooms). I
tried this method on several occasions and I was successful in beating
levels.
This method of going from room to room in an efficient
manner (no repeated travels), was generated by my logic. Through trial and
error I was able to come up with this optimal strategy; and this strategy
wasn’t read from a magazine or a strategy guide.
There are also other methods that work for solving a
problem in super metroid. During the problem solving phase, my brain was
able to go through the possible methods and select the most optimal for that
problem. If I failed in solving the problem I will select another optimal
method to solve the problem.
The point I’m trying to make is that human logic is
needed when the robot is stuck in a videogame. He needs to solve the
problem by using lessons taught in school to find solutions to problems.
The conscious can determine distance by using visual
data in memory
The robot senses 2-d images from the environment, but
the brain stores them in a 3-d manner. The 2-d images are stored in a 3-d
grid and a 3-d model of the environment is formed in memory. The robot’s
conscious can take visual information and determine distance.
There can be different types of visual data extracted
from memory. One type is a still picture of a memory. The conscious can
use intelligent pathways to analyze the still picture and determine
distance. For example, in the still picture is one building and a bridge.
The robot’s conscious can analyze this memory and determine that the
distance between the bridge and the building is approximately 50 yards.
In this example, the teachers teach the robot how to
determine distance based on a still picture or in real life.
The conscious can also fabricate a map of cities and
determine the approximate distance. Teachers use worksheets of maps and
they want the students to write down the distance between two cities. Let’s
say the robot is familiar with the entire island of Hawaii, and the robot
was given a map worksheet of Hawaii. From encountering the environment for
many years the robot has an approximate distance of the cities. If the
teachers teach the robot the exact distances between cities, then the map
can determine distance standards.
If the robot were to live in California and remembers
all the locations, he can activate a fabricated map of California and
determine the approximate distances between cities. This fabricated map of
California was generated by the lessons taught in school using Hawaii
maps.
Learning to search for information
Teachers teach the robot how to search for
information. These intelligent pathways will be used to search for data in
memory. The robot can extract a data in memory and use a specific type of
search, according to its goals, and extract relevant data. He can take a
memory of an event that happened 2 days ago and fast forward or backwards to
find information. He controls the speed of the fast forward or backwards –
he can slow down the speed or increase the speed of the search.
Other intelligent pathways are needed for the search,
such as what to look for and how focused is the search. The search can be
cursory, whereby the robot is analyzing the movie sequence with moderate
focus. On the other hand, the search can be detailed, whereby the robot is
analyzing the movie sequence intently.
He can also control the demographical areas in the
brain to search for information. Should the search function be spaced-out
or only localized in one general area. The search function can also focus
on 2 or more general search areas simultaneously. The lessons in school to
search for things in the real world create the intelligent pathways to
search for data in memory. For example, the teacher can teach the robot to
rewind and fast forward a movie in a DVD to look for information. This
intelligent search pathway can be used to search for data in a recalled
memory (note: a recalled memory is similar to a DVD movie).
Teachers can teach the robot to search for a specific
type of media for an object. For example, if the robot is coloring a book
on birds, the robot has to have an image of a bird to understand what the
colors of a bird look like. The object is a bird and the robot has to
search in memory for an object composite of a bird (also called a floater).
Within the bird floater, the search function is only interested in
extracting visual images of a bird. The visual image of a bird activates in
memory and the robot will color the picture according to the color in the
robot’s mind. This example shows that during a situation, the search
function can search for specific types of data related to an object
composite.
Maybe the robot’s brain can form intelligent pathways
to search for data in memory based on math diagrams. The sight images are
structured in terms of circle boundaries and the sound data are structured
in terms of square boundaries. The intelligent pathways in memory can form
“any” search algorithm in a network (the robot’s memory). The brain will
configure the data from the current pathway in terms of math diagrams and
use a patterned search method in memory. This pattern search method is
created in intelligent pathways through lessons in school.
Searching data in terms of a book or report
When the robot reads a book linearly, the robot’s brain
stores a physical approximate 3-d book in memory. The robot can flip
through the pages, zoom into small areas of pages and so forth. The robot
can recall a report about a person he read 2 days ago. He can analyze areas
of the report. Let’s say that the report list the background information
about dave. The robot can flip pages of the report, zoom into the name
slot, the occupation slot and even analyze the picture of dave. Thus,
static data stored in memory isn’t based on one full data, the robot has
free-will to search for minor details of the static data – he can zoom in or
zoom out or pan right or left of the static data to search for
information.
If the robot picks up a book and he flips to the first
page, he will see the overall page, but he can’t see the text in detail.
Only when the robot zooms-in and see the text will he be able to understand
what is on the page. Only when the robot read text sequentially will he
understand the content of the page. Sometimes there might be pictures or
diagrams in the page and the robot has to zoom-in to analyze the picture
before it can be stored as static data in memory. If the robot wants to
recall the picture on the page, he has to access the zoom-in frames of
seeing and recognizing the picture. This is a very powerful learning tool
to analyze static data in memory.
Self-Awared robots
The definition of a self-awared robot is a robot that
can control all aspects of its decision making. Every second that it lives,
the robot is aware that it’s alive and that it controls its body to change
the environment. The intelligent pathways in memory self-organize and they
are structured hierarchically. The ABC block problem is one example. The
blocks can be positioned in any order or in any position, the robot will
still be able to stack them up in an ABC manner. The reason behind this is
because the robot was taught many examples of the ABC block problem by
teachers. The teachers guide the robot to do the necessary steps to
accomplish the task correctly. As the robot’s brain self-organizes these
examples of the ABC block problem, he was able to form universal pathways.
These universal pathways will allow the robot to solve the ABC block problem
regardless of the environment – he can solve the problem in school, at home,
at a park or in a train. The world can be upside down, but the robot will
still be able to solve the problem.
In Nils J. Nilson’s Stanford University book, called
Artificial Intelligence: A new synthesis, he uses a combination of
recursive planning programs (called the strip program), discrete math,
predicate calculus, induction/deduction, semantic models, language parsers,
search algorithms and ruled based programs just to solve the ABC block
problem. The distinction between his methods and my methods are completely
different. Mr. Nilson’s AI book was used in my artificial intelligence
class in late 2003.
The way I solve the ABC block problem comes straight
from the robot’s conscious. The teacher will tell the robot the main
objective: “stack up the blocks in an ABC format”. The teachers will also
guide and give commands to the robot in a step by step manner. The robot is
given this command: “identify the C block and put it on the floor”. The
robot has learned to do this task previously by a teacher and understand the
instructions. The robot will identify the C block, which is to look around
and recognize the C block. It will grab the C block. It doesn’t matter
where the C block is or how it is stacked with the other two blocks. The
command is to grab the C block. If the C block is on the floor and the B
block is stacked on top, the robot will take the B block and put it on the
floor and grab the C block. When the C block is grabbed, the robot will put
in on the floor. If the robot does something wrong the teacher will guide
the robot to do the correct thing. Next, the teacher will give another
command: “identify the B block and put it on the C block”. The robot will
identify the B block and grab the B block. If the B block is on top of the
A block, the robot will simply grab the B block. Then, the robot has to
identify where the C block is because the command given was to put the B
block on top of the C block. When the C block is identified, the robot will
carry the B block and put it on top of the C block. Finally, the teacher
will give the last command: “identify the A block and put it on top of the
B block”. The robot will identify the A block, and then put the A block on
top of the B block.
Doing the task in real life and physically handling the
blocks is a must in order to understand objects and 3-d space. It will also
identify states of the blocks. If the B block is on top of the A block, the
B block isn’t on the floor. The fact that the robot see the ABC blocks
stacked a certain way declares that state. When the ABC blocks are
scattered all over the place, the problem is at its beginning stage. If the
C block is on the floor and the B block is on top of the C block and the A
block is on top of the B block, then the problem has ended.
When the teacher teaches the robot many examples, he
will eventually get it. If the teacher does her job correctly and
successful forces the robot to carry out steps to stack the blocks, then the
robot will have created intelligent pathways in memory to solve the
problem. These intelligent pathways go through self-organization to form
universal pathways so that the robot can solve the problem under any given
environment.
When the robot watches TV, he won’t be watching the TV
in a systematic way. The robot wonders around in the TV monitor looking at
objects to focus on that gets its attention. If there were 4 anchors and
each anchor takes turns speaking, the robot will focus on the anchor that is
speaking at the moment. Sometimes, it focuses on something else on the
monitor such as an object an anchor is describing. The robot chooses to
focus on things it wants to focus on. The robot’s choice are based on
innate behaviors and by lessons learned from teachers.
Sometimes, the goals and rules of the robot determine
what to focus on in the TV monitor. Strange events in the TV might focus
the robot’s attention toward a minor object. Maybe a goal of the robot is
to pay attention to the background noise and not the news anchors or to pay
attention to the small bird outside the window.
Being self-awared also means that the robot can control
a wide variety of things the robot’s conscious is responsible for, such as:
analyzing a situation, managing multiple tasks, outputting logic, providing
meaning to language, giving facts about objects, solving interruptions of
tasks, solving a problem, focusing on objects, predicting the future,
fabricating maps, planning routes on the fabricated map and so forth. The
robot controls all aspects of how the conscious thinks and acts. This
control gives the robot a sense of self-awareness. All human beings and
human robots work the same way: to pursue pathways in memory that will lead
to pleasure and to stay away from pathways in memory that will lead to
pain.
Friendly conversation inside the robot’s conscious
The voice inside the robot’s conscious is the engine
that does everything for the robot (act and think). The robot’s conscious
can: manage tasks, execute multiple simultaneous tasks, solve interruption
of tasks, provide knowledge about a situation, provide meaning to language,
solve problems, focus attention, search for data, forget data, modify data,
take action, make decisions, provide sets of rules while doing a task, and
provide a friendly conversation.
I think of this voice as the robot’s friend. Actually,
the voice is itself, but the robot can imaginarily think that it comprises 2
people or a group of people. In fact, the friend in its mind can be
different people. The robot can be talking to itself like he is talking to
a parent or a friend or a teacher or a group of friends.
When I was in college, I attended an art class and
after each assignment is finished, we would post our artwork on the wall and
everyone has to comment on each artwork. The comments can be
question-answer, facts about the artwork, descriptions, personal
likes/dislikes, comparisons, advice, logical fact, joke comment and so
forth. The collective voices of not only the teacher, but the robot and
other students are stored in memory based on analyzing artworks.
The next time the robot has to analyze an artwork, the
collective voices of a group of people will activate in the robot’s mind.
The robot is debating and commenting and giving opinions in his brain about
the artwork. Sometimes the robot is saying something to the friend and
other times the friend is saying something to the robot. The robot might
ask a question and the friend answers the question.
The robot can talk to itself like a parent. Maybe the
robot is doing drugs and his conscious is being honest with the robot.
Things this friend will say will sound a lot like his parent. Some
sentences might be: “don’t do it. drugs are bad for you”, “I will ground
you if you take drugs”. On the other hand, bad friends will talk to the
robot as well, such as “take the drug. If you don’t you will look weak” or
“you chicken”.
The robot can also learn to think a certain way.
Teachers can teach the robot to have a meaningful conversation in its mind.
For example, a teacher can say this to the robot: “when you are solving a
problem, talk to yourself and debate a way to solve the problem”. When the
robot is solving a problem and the problem is difficult, it will talk in its
mind in a group like setting; and being both the person asking questions and
the person giving the answers.
Popular learning commands are: “when you are bored, do
something”, “at lunchtime, plan a restaurant to go to”, “when you have free
time, think of things you like to do”. These are questions that teach you
to think when you are in a specific situation. For example, if the robot is
at home, bored and has nothing to do, he will think of something to do.
In other cases, the friendly conversation is created
from the absence of friends. Let’s say the robot was a very social guy in
high school. Everywhere he goes, he has lots of friends to talk to. After
high school, he went to college and most of his time is spent studying.
When the robot has free time and there are no friends around, the obvious
thing is to talk to the air. The speaker and the listener is the robot. We
can take it a step further and say that if the robot was in public, but
doesn’t have a friend nearby, he will talk in his mind. He does this
because he doesn’t want people around him to think his crazy.
If you think about how ideas come to the robot, the
voice in his head is debating to generate ideas. When the robot is in a
classroom, he is surrounded by ideas thrown by other students. These group
ideas didn’t come from the intelligence of the robot. During the
self-organization process, the group ideas stored in memory form the
intelligent pathways so that the robot can generate ideas that come from
someone else.
Also, teachers are a big factor in the development of
the robot’s conscious. When the robot is solving a problem or reading a
complex text book, the voice will be a teacher guiding you, teaching you and
giving you information about how to read the text book. The reason why is
because the robot learn science knowledge and complex knowledge based on
teachers. It’s natural that the robot activates voices of teachers in his
mind when he reads a book related to school subject matters.
Finally, if the robot learns to comment about a person
in a party from family members and personal friends, then their collective
voices will be in the robot’s mind when he is in a party. In the party, the
robot’s mind will be thinking: “that is one sexy girl”, “the music is bad”,
“I don’t like the food served here”, and “don’t say anything bad about party
members”.
Teachers teach the robot how to do math equations in
school by using fingering pointing as a guide to focus the robot’s eyes on
important numbers. If the robot watches the teacher give a lecture on
solving addition problems, the lesson will be stored in memory. Both the
linear steps to the equation and the guidance from the teacher are stored in
memory.
When the robot has to do the addition problem by
himself, the conscious will activate the teachers finger to point to vital
numbers. Even though the teacher isn’t there, the association between the
addition problem and the teacher’s guidance (finger pointing) are so strong
in memory that when the robot is solving an addition problem the teacher’s
guidance automatically activate. In some respects, the addition problem is
the target object and the teacher’s guidance is the activated element
objects.
Translating languages
Let’s say that the robot is a translator and his task
is to translate sentences spoken in German into English. A speaker will
speak in German and the robot will activate the meaning to the sentences.
These activate thoughts will come in the form of 5 sense data or a
fabricated movie. The robot will simply use an intelligent pathway in
memory to analyze the fabricated movie and translate the images/5 sense data
into English sentences.
It’s no different than activating thoughts in the
robot’s mind and using intelligent pathways to convert 5 sense data into
linear structured sentences. For example, the sentence spoken in German
might be: “the dog jumped over a box”. The robot will activate the meaning
to the sentence in his mind. Images of a dog leaping over a box are
fabricated in his head. Next, the robot will remember this fabricated movie
and using an intelligent pathway from memory to translate what he is seeing
in his mind into structured English sentences. The subject is a dog, the
action is jumped and the other object acted upon is a box. Grammar rules
activate such as subject-predicate. The robot will construct this English
sentence: “the dog jumped over the box”.
Modifying massive facts in the robot's
brain by reading books or attending lectures
Let's say that the federal government
decided they wanted to change all the rules of driving -- green light is red
light and red light is green light, etc. Every driver has to read and
understand all the new rules and apply them to driving immediately. For
human beings this task is easy, but for computers this task is very
complex.
In the robot's brain, there is a section
that is devoted to facts, rules, and procedures in terms of driving.
Networks of data pertaining to one subject matter (driving) is neatly
organized in memory in a hiearchical-associated manner. The task of the
robot is to read and understand a book on the new rules of driving. He has
to insert all the new rules and procedures and to delete all the old rules
and procedures in memory.
As stated before, the intelligent
pathways in the robot's brain can form any type of computer program to do
work. In this case, the conscious will create a computer program to insert
new facts and to delete old facts relating to driving. This computer
program is putting high priority on every single new fact identified in the
book and it is deleting any old facts stored in memory. Remember, the old
facts aren't actually deleted from memory, they are simply forgotten.
Think of the computer program inside the
conscious as a software that generates functions to modify a massive
database system. There are thousands of rules and procedures in terms of
driving and this computer program has to modify specific rules and not all
rules. Some driving rules are still followed. A new rule might be: green light is red light and vice versa, but the yellow light remains
the same. The robot will modify data in memory based on the sentences read
in the new book. During the reading of the book, the robot's goal is to
remember all information in the book into memory and to identify old
respective rules from memory and delete them. After reading the entire book
2-3 times, the database in the robot's memory, in terms of driving, is
modified. All or most of the new rules are stored in memory and most of the
old rules are deleted from the database.
The uniqueness of a human brain is the
ability to forget information. After 5 years implementing the new rules of
driving, if the government decides to change the rules back to its original
format, human beings can accomplish this without reading a new book. Their
brain can remember what the old facts about driving are. For example, their
brain can tell them: the old rule about traffic lights is red light means
stop, green light means move and yellow light means pause. However, it
would be more efficient if each driver simply read a book on the old rules
of driving.
If you look at current database systems
using SQL or robot cars, human programmers are needed to write the functions
to modify information. For example, if the government changes the rules of
driving, a robot car requires that human programmers modify the rules and
procedures "manually".
Condensing information about people,
places, and things through words
Imagine personC has a file consisting of
100 pages worth of background information. Computers can save a lot of
diskspace if they use individual words to describe a person. Those 100
pages on personC can be represented by 2-3 words. In some cases, personC
can be represented by 1 word.
The robot's brain basically condenses
information by using individual words to describe a person, place or thing.
When the robot recognizes an object, the most important facts about that
object will be presented to the conscious. These facts will mainly consist
of individual words. If a person loves to read alot, the words "nerd"
basically represent that person. If a person is obese and is trying to lose
weight, the word "fat" basically represent that person. If a person has
been arrested 20 times and do drugs, the words "repeated criminal" describes
this person.
With words like "repeated criminal",
people have an idea, based on stereotypes, who this person is, what they did
in the past, and what they will do in the future.
In some cases, people, places and things can be described by a picture. The robot is able to know a lot about a person's background through 1 or several pictures.
Referencing pathways
English sentences stored in pathways can reference other pathways.
The diagram below shows a pathway to reference other individual pathways. In this case, pathway20 is a pathway that does 2 simultaneous tasks (R1 and R2).
The sentence: "cook hamburger and play a racing videogame simultaneously" manage 2 tasks simultaneously by switching between tasks until both tasks are completed.
Pathway20 is known as a universal pathway because R1 and R2 can be any task. Pathway20 simply references individual task pathways in memory to manage 2 simultaneous tasks. For example, R1 can be cook pizza or R2 can be clean the living room.
 In pathway20 there is also another task, which is to temporarily change the rules of the racing game. The instructions include following a temporary rule: red light is green light and green light is red light. The dominant information in memory is green light is go and red light is stop. However, the temp rule allows the robot to temporarily follow the opposite rule. This shows that pathway20 can temporarily change the rules and goals of pathway R2.
Also, English sentences stored in pathways basically define how data is stored, configured, and searched. The robot goes to school to learn knowledge and that knowledge define how data is stored, configured and searched in the robot's brain (refer to my books for details).
Pathways are clustered and stored in a timeline/s
Another important thing to remember is that in a given task, like playing baseball, pathways are stored in clusters in a timeline. Pathways are stored at the beginning, middle, and ending of a game and depending on the time of the game and situation, the robot’s brain extracts different pathways. For example, at the beginning of the game, the robot will extract pathways to follow instructions from a coach. At the beginning of a baseball game, the coach will give the batting lineup and player positions. In addition, there are some rules and objectives that are given, like the batting signals and how hard to play the game.
Another example is driving a car. Pathways for driving are also stored based on a timeline. At the beginning, middle, and ending of driving there are specific rules and procedures to follow.
This is basically how my robot manages complex tasks. It uses the pathways as a way to separate individual procedures of a job. At the beginning you do this, at the ending you do this, in this situation you do that, if you’re playing as the pitcher use these pathways, in multiple situations you do this, if you identify a street light you do that, etc.
Every human task has different decision trees. And these decisions tree comprises massive forest and trees, connected or separated. These pathways can form any type of computer program or function to accomplish a task, regardless of how complex they may be. Writing software programs for Microsoft is a very complex human task and it spans all skills and knowledge. In some cases, the whole brain will light up because it is accessing information from all cognitive skills in order to do something complex like write software programs.
In pathway20 there is also another task, which is to temporarily change the rules of the racing game. The instructions include following a temporary rule: red light is green light and green light is red light. The dominant information in memory is green light is go and red light is stop. However, the temp rule allows the robot to temporarily follow the opposite rule. This shows that pathway20 can temporarily change the rules and goals of pathway R2.
Also, English sentences stored in pathways basically define how data is stored, configured, and searched. The robot goes to school to learn knowledge and that knowledge define how data is stored, configured and searched in the robot's brain (refer to my books for details).
Pathways are clustered and stored in a timeline/s
Another important thing to remember is that in a given task, like playing baseball, pathways are stored in clusters in a timeline. Pathways are stored at the beginning, middle, and ending of a game and depending on the time of the game and situation, the robot’s brain extracts different pathways. For example, at the beginning of the game, the robot will extract pathways to follow instructions from a coach. At the beginning of a baseball game, the coach will give the batting lineup and player positions. In addition, there are some rules and objectives that are given, like the batting signals and how hard to play the game.
Another example is driving a car. Pathways for driving are also stored based on a timeline. At the beginning, middle, and ending of driving there are specific rules and procedures to follow.
This is basically how my robot manages complex tasks. It uses the pathways as a way to separate individual procedures of a job. At the beginning you do this, at the ending you do this, in this situation you do that, if you’re playing as the pitcher use these pathways, in multiple situations you do this, if you identify a street light you do that, etc.
Every human task has different decision trees. And these decisions tree comprises massive forest and trees, connected or separated. These pathways can form any type of computer program or function to accomplish a task, regardless of how complex they may be. Writing software programs for Microsoft is a very complex human task and it spans all skills and knowledge. In some cases, the whole brain will light up because it is accessing information from all cognitive skills in order to do something complex like write software programs.
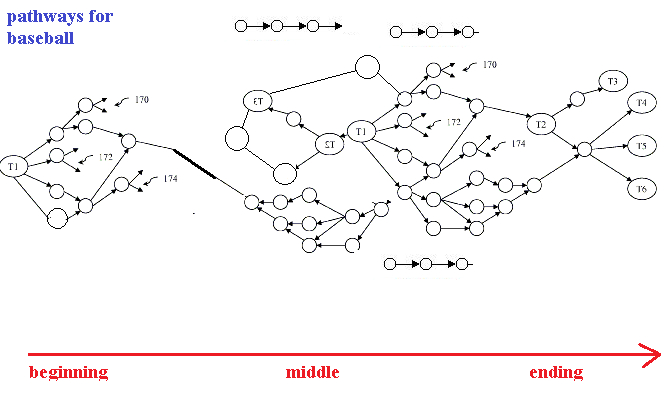 English sentences structure data into self-created semantic networks
A sentence like “this is a cat” has patterns. The pattern is, in memory, the location of the word cat and the visual image of a cat is located really close to each other. This sentence basically helps the robot to organize and create data in memory. If the robot has never encountered a dog before and the teacher points to a dog as says “this is a dog”. Based on the sentence the robot’s brain will create 2 objects in memory: the visual image of a dog and the sound data dog. These 2 objects will be created and stored close to each other in memory.
This is a ----
English sentences structure data into self-created semantic networks
A sentence like “this is a cat” has patterns. The pattern is, in memory, the location of the word cat and the visual image of a cat is located really close to each other. This sentence basically helps the robot to organize and create data in memory. If the robot has never encountered a dog before and the teacher points to a dog as says “this is a dog”. Based on the sentence the robot’s brain will create 2 objects in memory: the visual image of a dog and the sound data dog. These 2 objects will be created and stored close to each other in memory.
This is a ----
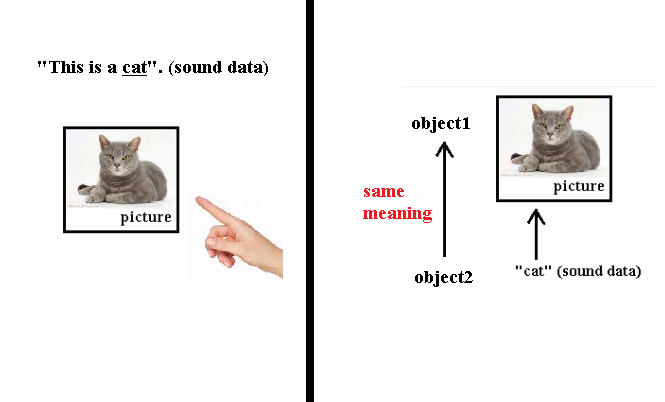 A sentence like “a wolf looks similar to a dog” also has patterns. The robot will find the patterns and attach them to the sentence structure: a R1 looks similar to a R2. In memory, the robot’s brain will establish relational links between the 2 objects: wolf and dog. The relation is that both objects are visually similar.
A sentence like “a wolf looks similar to a dog” also has patterns. The robot will find the patterns and attach them to the sentence structure: a R1 looks similar to a R2. In memory, the robot’s brain will establish relational links between the 2 objects: wolf and dog. The relation is that both objects are visually similar.
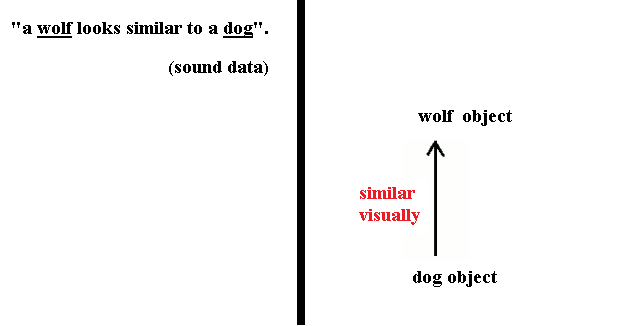 The point I’m trying to make is that English sentences generate self-created semantic networks in the robot’s brain. Data are organized in complex data structures based on English sentences. Decision trees are structured into decision making semantic networks. Data inside the brain establishes relational links and operations like a semantic network; and search functions are discovered on its own to search for data in these semantic networks. Even things like logical networks, decision making systems, and induction and deduction reasoning are self-created.
The point I’m trying to make is that English sentences generate self-created semantic networks in the robot’s brain. Data are organized in complex data structures based on English sentences. Decision trees are structured into decision making semantic networks. Data inside the brain establishes relational links and operations like a semantic network; and search functions are discovered on its own to search for data in these semantic networks. Even things like logical networks, decision making systems, and induction and deduction reasoning are self-created.